





文/新戰略機器人全媒體 黃滿婷
全球AGV機器人專利申請情況
AGV機器人技術目前已經經歷了一個完整的技術生命周期,現處于第二個技術生命周期的發展階段;全球對該技術的研究集中于自主定位及導引系統、負載搬運系統、管理監控系統、架構及加工系統、能源系統、安全裝置系統及運動控制驅動系統。

就專利申請量而言,自主定位及導引系統為全球投入重點;就技術創新水平及技術質量而言,全球各國及各國內家似乎領域水平差異較大;從地域分布的視角來看,中國、美國、日本、德國、韓國為全球AGV市場的領先國家。中國引入AGV機器人的時間比較晚,但有后來居上的趨勢,AGV機器人申請量排名僅次于日本,占據第二位。
隨著AGV機器人計算機技術和智能控制策略的發展,開始走向集成化和智能化,專利的主要關注點在AGV機器人自身定位的精準性和行走方式的控制上,且涉及核心技術的申請量主要集中在歐美日韓等國家,通過對全球AGV技術與領先國家AGV技術專利布局的對比,可知:目前中國AGV專利布局出現了技術創新水平低,核心系統申請投入低,對外技術壁壘門檻低,進攻力度薄弱且外來競爭者進攻力強等問題,未來應集中精力改進導航方式、控制方式以及AGV結構上,在AGV機器人知識產權上爭取更多的話語權。
國產AGV機器人專利:從實用性轉為發明性
根據相關檢索數據,截止目前,AGV機器人相關發明專利近9000項,而2019年,國內專利申請數量超1800項。
通過對AGV機器人、物流機器人等相關專利文獻的標引,發現專利申請側重領域很多,其核心包括改善導航方式研究(根據具體的應用環境選取特定導引方式,或者采用多種導引方式結合的方式取長補短以達到較好的綜合效果),自身定位精度、控制系統和路徑規劃方法,如通過改進導引設備自身以提高定位精度、集成控制系統的設計、路徑規劃方法的選擇為實現AGV機器人的精確定位。
國內的AGV機器人相關專利申請人主要集中在高校和中小企業,其中高校申請人主要有如哈爾濱工業大學、浙江大學、合肥工業大學等。而企業申請人中主要以新松機器人、嘉騰機器人、海康機器人、國自等公司占大多數,近些年因倉儲等新興行業快速發展起來的如極智嘉、快倉等企業專利申請占比也較大。
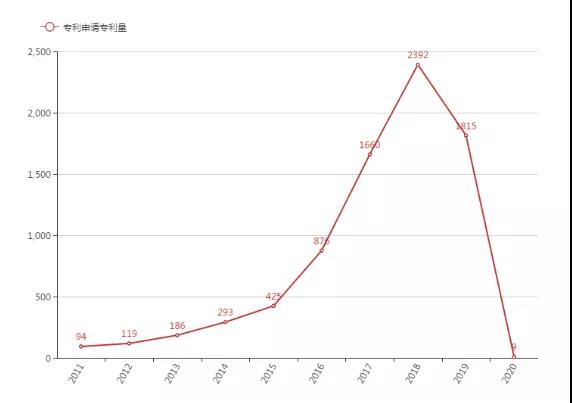
AGV專利申請趨勢分析
在專利類型上,2018年之前申請專利主要集中在實用性專利,2019年所申請的專利主要為發明專利,較以前有了比較大的突破。

AGV專利類型數量趨勢分析
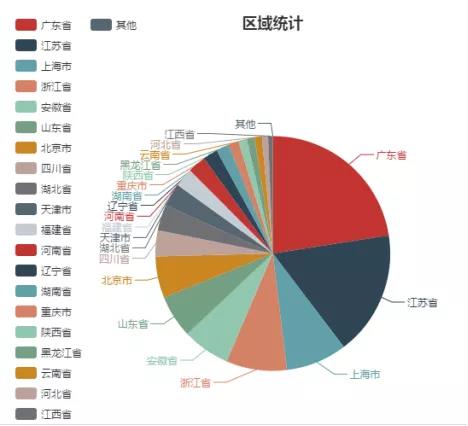
區域方面,廣東省、江蘇省、上海市和浙江省幾乎占據了全國AGV機器人專利申請的大半,珠三角和長三角地區是目前AGV產業最為發達的地方,在技術創新方面活力十足。
新技術應用方向:始終以需求為立足點
從國產AGV機器人專利的申請情況不難看出,隨著制造業和物流行業的持續快速發展,不斷提升物流效率,AGV行業已經意識到創新技術的重要性,并已經走在了從實用性專利轉變為發展發明型專利的道路上。但是盲目的通過技術驅動市場帶來的只會是市場泡沫,創新技術的研發方向始終要從客戶的需求出發回到應用,而如今應用端的需求更加復雜多樣,主要體現如下幾個方面:
首先,移動結構多樣化。不同行業領域多樣化的應用場景需要各種各樣、各種類型的移動機器人。按負載可以分為輕量級、中等載重,重型載重AGV;從環境可以分為室內和室外;很多企業也在持續嘗試移動結構優化和創新結構。
其次,導航方式新型化。在室內應用場景中,傳統的磁條、磁感應線、磁釘等可以確保穩定可靠,有些還能做到很精確,但是他們需要施工和長期維護,路徑不能輕易調整,不能適應柔性生產需求,部分在降低成本的同時忽略了安全性,人機交互過程中會對人有一定危險性。可滿足柔性、高效、安全與人機交互需求、路徑可調的導航方式目前不多,尚有很大探索空間。
第三,應用形式新穎化。近年來,很多企業設計了很多新的應用形態來推動物流自動化發展。列如基于二維碼定位導航技術有效推動了電商物流發展、立體藏戶內的多向穿梭車可幫助提供更多新穎的應用形式出現、庫卡提出的矩陣式的生產模式等,這些需求不僅對AGV技術,而且對視覺的技術都提出了更高的要求。
最后,調度系統規模化。在多樣物料,多種設備、多產線、多倉庫大規模生產制造中,多臺甚至數百臺AGV規模化集群作業成為發展的必然,AGV機器人調度系統也將變得越來越大。調度系統中會涉及不同車型、不同環節、不同作業要求、不同作業類型,并且涉及大范圍大場景,如何對這樣的系統進行高效的管理和高效的調度,來提高生產的效益,給企業提供更高的附加價值也非常重要。


