







從大自然中攫取靈感,我們的機器人正變得越來越柔軟。近年來,機器人行業涌現出了一大批奇形怪狀的、未來感十足的機器人:夾具(EOAT)像章魚觸手般靈活的機器人、在發動機內鉆來鉆去的機器人、在水下自制能量的機器人…… 這些發明無一不挑戰著我們傳統思維中對機器人發展方向的設想。

新加坡國立大學(NUC)使用柔性面料制成的外骨骼手套
據IDC預測,到2020年,全球機器人行業的市值將達到1880億美元,但現階段的機器人還有很多不足,如它們都是用剛性材料,如金屬、塑料制成的。可以想見的是,未來的機器人會更輕、更柔軟、對外部動力依賴程度更低,到時候人機協作會更安全、更協調。
近日正在新加坡舉行的2017年ICRA機器人大會上,相信人們一定很難從這款機器人身上移開視線,它是一款專門為“鉆入”人體肛門而設計的機器人。據悉,這款腸鏡機器人由來自美國科羅拉多大學波爾得分校的研究小組開發,機器人身體非常靈活,由于采用的是一種硅橡膠材料,所以它要比傳統的結腸鏡檢查工具更讓人感到舒服。此外,它在進入人體之后穿透腸壁的幾率要比傳統工具更低。這款工具可以在進入人體結腸之后在里邊拍攝圖像以及取樣進而幫助醫生診斷出疾病。

詳情:MIT研制透明水凝膠機器人 可快速抓放金魚
北京航空航天大學與國外一家公司近日合作研制成功軟體章魚觸手機器人。仿生軟體觸手從自然界中的頭足綱軟體動物(如章魚、烏賊等)的生理結構獲得靈感,由接近生物軟組織材料組成。仿生軟體觸手可快速實現其彎曲纏繞運動,內側分布的吸盤可有效地吸附物體,將吸附與纏繞兩種方式結合,實現對多種不同形狀,不同尺寸、不同擺放姿態物體的安全、無損、穩定抓持。未來將應用于工業、醫療、康復、服務等領域。

詳情:北航研制成功仿生軟體機器人
麻省理工學院(MIT)的研究人員創造了一種使用水凝膠制成的全新機器人,當將其置于水下時,肉眼幾乎不可見。盡管是由透明的水凝膠制成,但這種機器人能夠進行合理地快速移動,包括抓住活魚等。在抓住活魚后,還能釋放它令小魚安全回到水中。研究人員表示,這種精確但溫和接觸的機器人將來能被用于多個領域,包括協助醫生完成手術等。
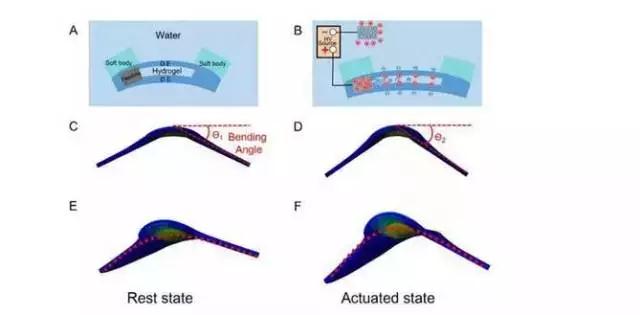
近日,浙江大學航空航天學院、浙江省軟體機器人與智能器件研究重點實驗室李鐵風副教授和黃志龍教授課題組從海洋生物鰩魚(蝠鲼)的柔軟身體與柔性撲翼推進獲得啟發,利用介電高彈體薄膜作為軟體人工肌肉驅動器。
介電高彈體是一種典型的電響應聚合物,在外加電場下作用下,介電高彈聚合物可以產生大變形,具有高彈性能密度、短反應時間、高效率等優點。當在介電彈性體上施加薄膜厚度方向的電壓時,介電高彈聚合物薄膜會減小厚度,擴大面積。該軟體機器魚是通過介電高彈體薄膜對交流電壓的響應,將薄膜張力變化轉化為機器魚的撲動,從而通過柔性鰭獲得水動力。
目前,英國機器人專家最新研制一種軟體機器人,它們通過吞噬有機物質獲取能量,能夠有效地消化一些活體微生物。科學家認為,這種自立型“機器人清道夫”可用于清除污水或者藻華。
它能夠從周圍的水域中搜尋有機物質,獲取能量“維持生存”。使用一種軟體聚合物膜做為“嘴部”,軟體機器人能夠過濾周圍的水棲環境,從而獲得所需的能量。但它不同于活體生物的胃部或者消化系統,它依賴于一種裝配細菌的微生物燃料電池,能夠分解有機物質。微生物分解釋放存儲在生物質能之中的化學能量,將其轉變成為機器人使用的電能。
哈佛大學的科學家借助過氧化氫催化分解產生的氧氣及可以自我反饋的微流體控制系統制備出了世界首個完全軟體的且自我驅動的機器人,外形類似小章魚,無需電力和外界控制,可獨立控制機械臂運行4~8分鐘。整個系統的核心部件如氣動傳輸網絡、燃料庫、催化反應室等通過3D打印制作。其集成設計和制作方法使得在該結構中的多材料可編程組裝成為可能,為全軟體自主化機器人打下了基礎。

詳情:新型“章魚機器人”實現全軟體結構
當然,軟體機器人的蓬勃發展并不意味著剛性機器人的消失。即使柔軟如布偶娃娃,它們內部也藏有剛性的馬達和塑料外殼。
可以肯定的是,單純生產柔性夾具而不生產配套剛性組件和相關系統的企業是無法生存的,Empire Robotics是全球第一家柔性夾具制造商,而它現在已經倒閉了。這個問題的關鍵在于,客戶想要的是一整套生產設施,包括機器視覺和機器學習,而不單單只是一個機器人、一個末端工具。

上圖為Cambridge Consultants發明的水果采摘機器人,不同于一般夾具,這個機器手裝備有機器視覺和機器學習系統,能智能識別抓取對象,計算抓取順序,并舉起、放下物品。研究人員Wrench表示,他希望能看到有朝一日機器人能和人一起工作,比如收獲像梨、蘋果這樣已“受傷”的果實。
無論如何,機器人行業內將充滿競爭,機器人企業也將面臨緊迫的發展壓力。


